Aurora Design Assistant
直観的で使いやすい、高度なマシンビジョンアプリケーション
高度なマシンビジョンアプリケーションをフローチャート形式で、簡単に素早く開発することが可能なソフトウェアです。
画像のキャプチャ、処理、解析、注釈描画、表示、保存がインタラクティブに構築可能です。ツールは生産性を向上するように設計されているため、ソリューションを市場に投入するまでに必要な時間と工数を削減できます。
このような課題をお持ちのお客さまは、私たちに、ご相談ください
このような課題を解決
- 画像処理構築に課題を抱える技術者の皆さま
特長
プログラムレスで簡単に素早く画像処理アプリケーションの構築が可能
USB3VisionまたはGigEVisionに対応した様々なPCで操作
RS-232、Ethernet、PLCなどの様々なインターフェースを準備
ロボットの制御が可能
機能
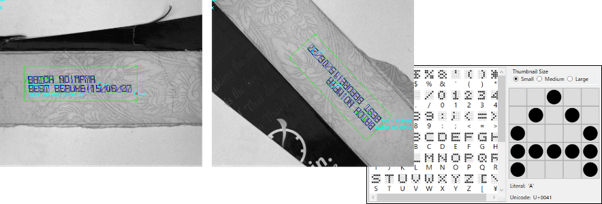
Deep Learning OCR

事前のフォント登録不要で文字サイズ・スコアなどの設定のみで文字の読取りが可能です。
内容物によって変形するパッケージの表面に印刷された文字のような規則性のない歪んだ文字や円筒上の印刷文字の読取りにも対応しています。
Aurora Focusを使用したDeep Learning OCR機能のデモンストレーション動画
基本画像処理

算術演算、フィルタリング、幾何学変換、論理演算、LUT、モフォロジー、2値化など画像処理に必要な前処理機能を含んでいます。
パターン認識
パターンマッチングとモデルファインダの二つの処理を含んでいます。パターンマッチングは、明るさが均一に変化する画像に対して、精度良く高速にサーチすることが可能な正規化相関を採用しています。モデルファインダは、輪郭などの幾何学的な特徴を用いてサーチを行う特許取得済みの技術を採用しています。モデルファインダは、重なりなどにより一部が欠けているオブジェクトに対して有効な手法です。
2D測長

幾何学的な寸法測定と公差判が可能です。定義された範囲内で幾何学的にもっともフィットするエッジを抽出します。また、抽出された寸法、位置、形状などの特徴量が設定された公差範囲内かどうかの判定も行います。幾何情報をもとに検出されるため、不均一な照明環境下でも正確な判定が可能になります。
特徴抽出と解析

オブジェクトの基本的な特徴を識別し計測することで、オブジェクトの存在と位置を判定することが可能です。粒子解析の結果として50以上の特徴量を取得することができます。
文字認識
予め定義されているSystem Fontや、ユーザー定義のフォントをもとに文字を読み取ることが可能です。幾何学的特徴量を利用するため、文字の、数、角度、スケール、アスペクト比に関係なく認識が可能です。
キャリブレーション

あらゆる処理結果をピクセルから実寸に変換する機能と、カメラレンズの歪みを補正する機能を含んでいます。歪み補正は、予め用意されたWebユーティリティを用いて簡単に行うことが可能です。
コード認識

1次元または2次元のコードの認識が可能です。回転や拡大縮小のあるコードに対しても正確に認識し、認識結果とコードの方向、位置、サイズを算出します。
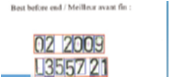
SureDotOCR
DotMatrix文字の読取を行います。
回転文字、異なるフォントの複数列読取にも対応しています。
ユーザー独自のフォントの登録も可能です。
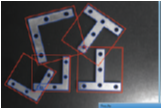
形状ファインダー
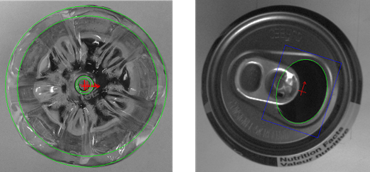
円、楕円、四角形、線分などの形状とサイズを設定し、設定した形状に近い形を見つけます。ペットボトルの底面のような、円に近いが円ではない形状でも見つけることができます。
畳み込みニューラルネットワーク分類
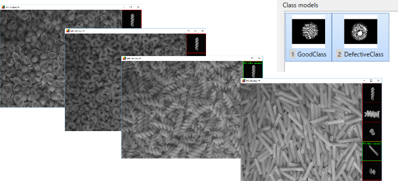
学習済のコンテキストをインポートすることで、分類機能を実装可能です。
フォトメトリックステレオ画像の合成
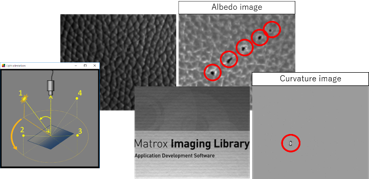
4台以上の照明を切替えて撮った画像を、照度差を活かして合成することができます。
ラフ・セグメンテーション
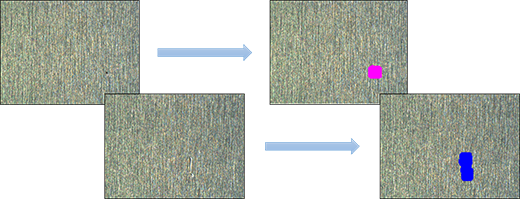
画像を分割し、各領域の分類を実行することで欠陥のおおよその位置を判別することができます。
3Dメトロロジー(計測)機能
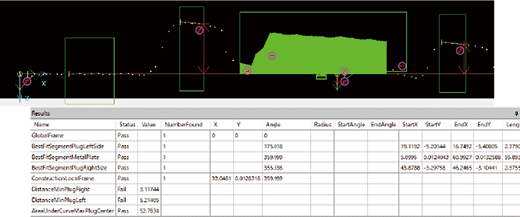
3Dカメラから取得した三次元データに対して、メトロロジー機能を使用して特徴(幅、高さなど)の計測を行うことができます。
カラー解析機能
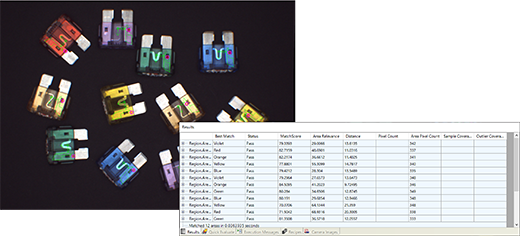
カラー画像に対して、ディスタンス(色空間の距離測定)、プロジェクション(色の特徴分離)、カラーマッチング(RGB、HSL、CIE Labの色空間によるオブジェクト識別)を行うことができます。
ビード検査機能
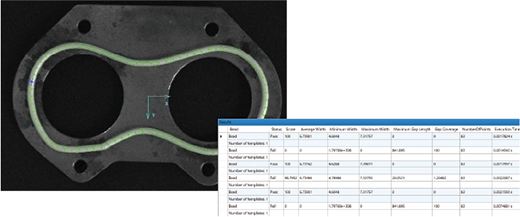
ビード検査機能を使用することで、溶接や接着剤の塗布状態(幅)を簡単に計測できます。
3Dデータ解析機能
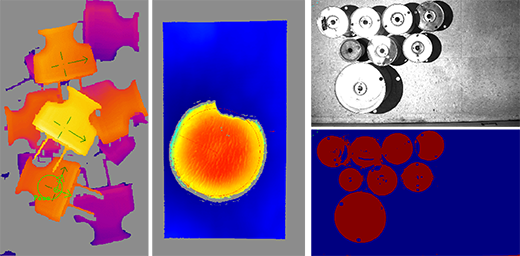
三次元データ(深度マップデータ、点群データ)に対して、体積や形状などの計測を行うことができます。さらにロボットピッキングへの応用、PLYデータとの比較を行うことができます。
リマップ・フィルギャップ機能

リマップ:深度マップに対して指定した範囲のみを有効データとして出力します。
フィルギャップ:無効データ(ギャップ)部分を補間します。
平面補正(AlignPlane)
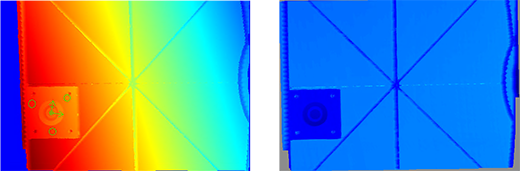
深度マップに対して指定した範囲をZ=0平面に補正することができます。
これにより元データの傾きを補正し、基準点からの高さデータなどをより正確に計測することが可能です。
ロボットインターフェース
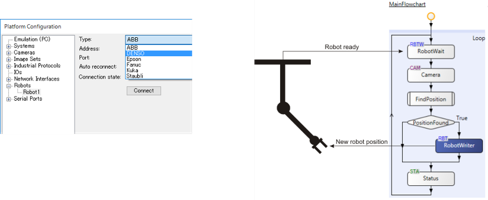
DENSO、ABB、Fanuc、Epson、Kuka、Staubli等のロボットをダイレクトにコントロールできます。
CameraFocus
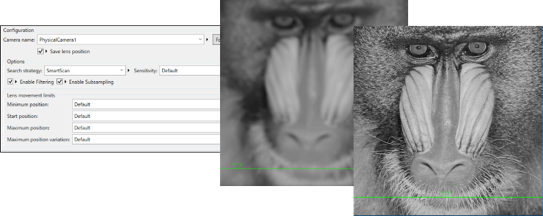
IrisGTRと対応するリキッドレンズを使用した場合、オートフォーカス処理が簡単に行えます。
サードパーティ製3Dセンサーインターフェース
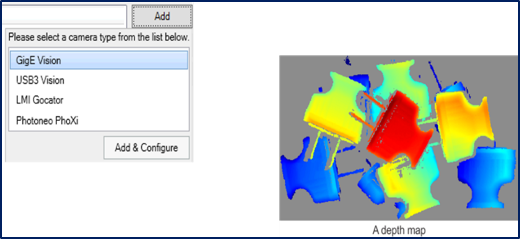
Photoneo PhoXi 3D, LMI Gocator, Wenglor weCat3D, Zivid Oneなどの3Dセンサーからダイレクトに撮像できます。
Communication
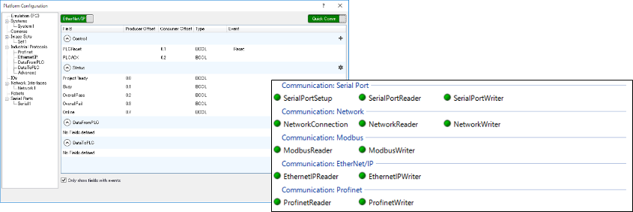
Serial Port、Network、Modbus、Ethernet/IP、PROFINET、I/Oなど様々な産業用通信に対応し、接続/通信を簡単にコントロールできます。
レシピ機能
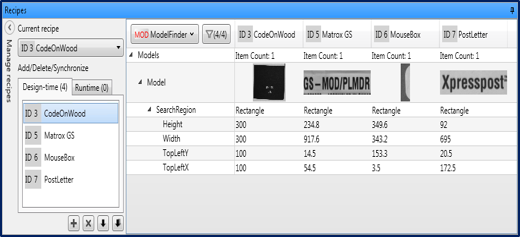
フローチャートを変更することなく、入力値や変数などの設定パラメータだけを変更して多品種検査に対応することができます。
OperatorView

HTML5サポートにより、Internet Explorer、Google Chrome、Mozilla Firefoxなどのブラウザから、OperatorViewにアクセスすることが可能です。
実行画面のローカライズ
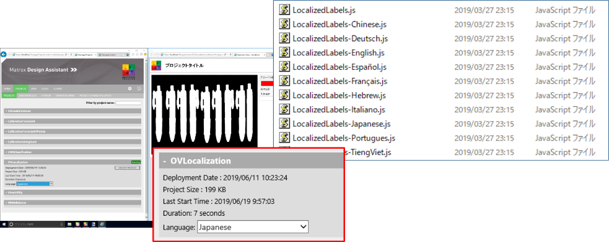
JavaScriptファイルをあらかじめ設定しておくことで、実行画面の表示言語を切り替えることができます。
マルチランタイム環境対応
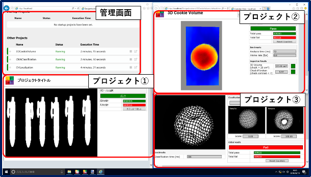
1台のプラットフォームで、複数のプロジェクトを同時に実行できます。
CustomStep
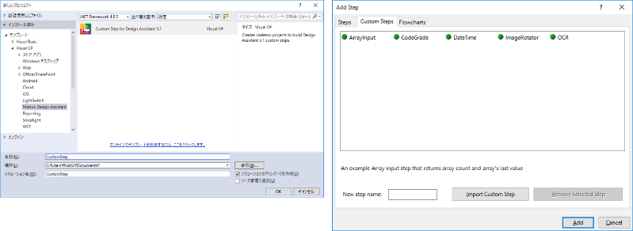
ユーザー独自の処理をステップとして組み込むことが可能です。
Aurora Design Assistant ではVisual Studio 2017による開発をサポートしています。
Portal Page
ブラウザ経由でプラットフォームでのプロジェクトの管理、カメラの確認、通信の監視等が可能です。
特別価格のご案内

Zebra Technologies製、画像処理ライブラリ「Aurora Imaging Library」および「Aurora Design Assistant」を、現在、数量限定の特別価格にてご提供中です。さらに今なら、いずれかの製品をご購入いただくと、CoaXPress 2.0対応フレームグラバボードを2枚、無償でバンドルいたします。
製造業の外観検査や品質管理、半導体・電子部品業界のウェハ・基板のパターン検査、食品・医薬品業界のパッケージ印字確認、物流・搬送業界のバーコード・QRコードの読み取りなど、さまざまな現場で活用されている画像処理ライブラリ。ぜひ、この機会に導入をご検討ください。
資料ダウンロード
画像処理ソリューション 導入のご相談・お問い合わせ
キヤノンITソリューションズ株式会社