シニアアプリケーションスペシャリストによる「技術トレンド情報」(第41回)「Polar3Dカメラ」コラム
公開日:2024年4月24日

産業用3D撮像技術については、コラム第35回「3Dセンシング」にて、3D撮像方式の種類と、それぞれの特徴をご紹介しました。今回は、昨今話題の、偏光型Structured light方式の3Dカメラ「Polar3Dカメラ」についてご紹介いたします。「Polar3Dカメラ」は、1ショット(1回の撮像)で奥行き情報(深度情報)を撮影するカメラの中で、特に外光の影響を受ける環境や、反射特性の高い金属光沢面などの撮像に適しています。
3D撮像技術
産業用途で利用される3D撮像技術は、2Dと比べると処理量も増えるため、ターゲットの状態(ターゲットが移動しているか否か)や、撮像デバイス側の状態(カメラ側が移動体に搭載しているか否か)の前提条件と精度要求を基に選定することになります。例えば、主に3D外観検査で用いられる「光切断方式」では、ライン型レーザー光を物体に照射すると、レーザー光は物体の凹凸を画像上の上下に変換するため、その上下する様をカメラで捉え、奥行き情報として得ます。1度の撮像で得ることができるのは、ライン型レーザーが照射している1ライン分のみであるため、撮像時は、撮像側を固定し、ターゲットを水平移動させるか、または、ターゲットを静止し、撮像側を水平移動させるかが必要になります。カメラの解像度を上げ、水平移動時間を遅くすることで、分解能を高めることができるため、高精度な3D形状の比較検査で用いられています。しかし、ターゲットまたは、撮像側のどちらか一方を水平移動させる必要があるため、自由移動するロボットアームや、AGV/AMR、サービスロボットなどへの搭載を考えると、1ショット(1回の撮像)で、カメラの視野内の3D像を得る技術も求められています。1回の撮像で、3D像を得ることができる撮像技術としては、「ステレオ方式」「ToF方式」「Structured light方式」の3点があります。「ステレオ」方式については、第24回 、第35回 、第36回コラムで紹介していますので、今回は渇愛します。「ToF方式」「Structured light方式」は、共に、人口的な光源を使用し、対象ワークが反射する光をとらえる“アクティブセンシング”に分類されるもので、外光の少ない暗い環境でも撮像可能となっています。
ToF方式とStructured light方式
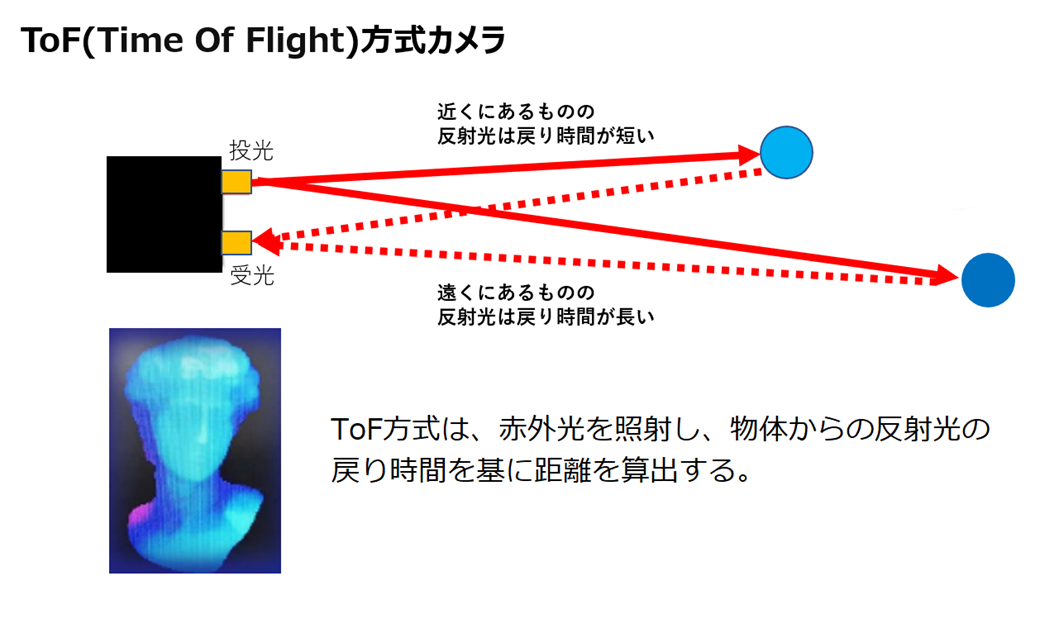
ToF(Time of Flight)方式の3Dカメラは、投光器と受光器で構成されており、投光器から対象物に向け、赤外光を照射し、対象物からの反射光を受光器で受け、その戻り時間を基に距離を算出します。1回の撮像で、面での距離情報を得ることができます。
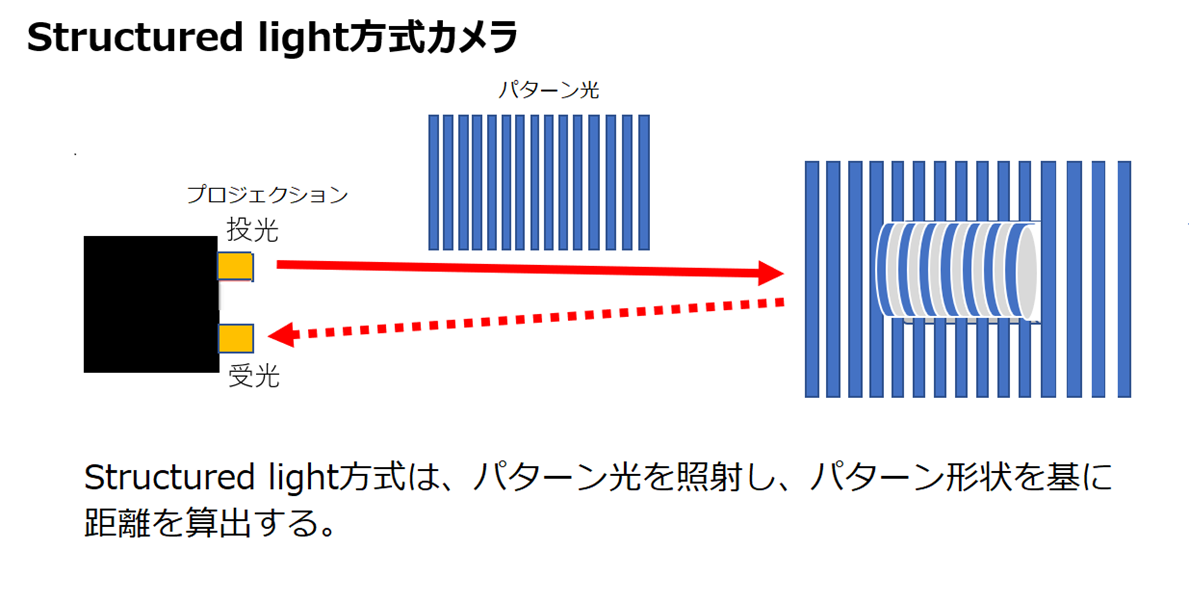
Structured light方式の3Dカメラは、投光器(プロジェクション)と受光器で構成されており、投光器から対象物に向け、ストライプや格子状などのパターン光を照射し、対象物からの反射光を受光器で受け、そのパターン形状を基に距離を算出します。1度のパターン光で撮像する場合、1回の撮像で面での距離情報を得ることができます。Structured light方式では、より高分解能な距離情報を得る場合は、複数のパターン光を照射する必要があるため、対象物を静止し、複数回撮像します。
ToF方式の3Dカメラと、Structured light方式の3Dカメラでは、Structured light方式の方が、解像度を高くしやすく、欠損値になりにくい利点があります。一方、コスト面は、Structured light方式は、投光器にプロジェクション構造が必要となるため、比較的高価な設定となります。
Polar3Dカメラ
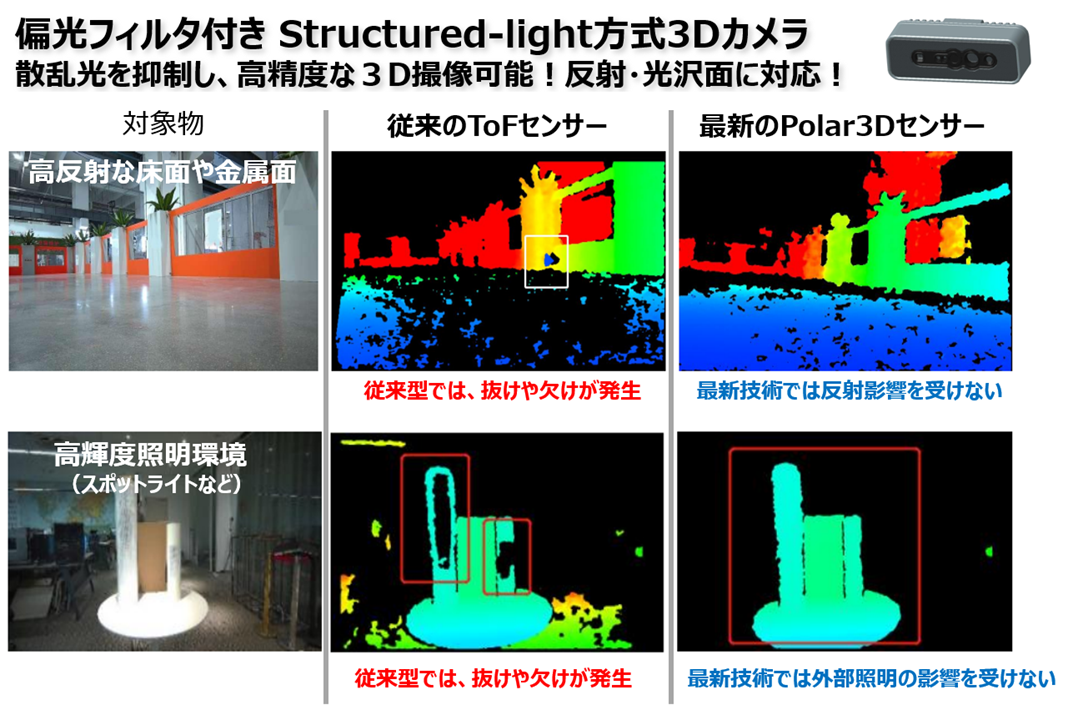
2024年にHMS社より偏光型のStructured light方式3Dカメラ「Polar3D」が登場しています。Structured light方式は、元々ToFセンサーより欠損値の少ない方式ではありますが、「Polar3D」カメラでは、素子レベルで偏光グリッドを搭載し、高反射な床面や金属面や高輝度な外光環境に対応しています。特にToFセンサーとの比較では、明らかに、床面や高輝度照明環境での再現性が高くなっています。下記画像は、同一箇所を「ToFカメラ」と「Polar3Dカメラ」で撮像したものになりますが、「Polar3Dカメラ」の方が、真黒な画素(欠損値)が少ないことが確認できます。
今回のまとめ
今回は、3Dセンシング技術の中でも、再注目されている「Structured light方式」について紹介しました。まだまだ、カメラの解像度(撮像分解能)は、2Dカメラに劣りますが、ロボティクス領域においての3D活用は、カメラ素子レベルの技術革新と、処理側となるSoC(Syste on a chip)技術の向上により、様々な分野用途への導入が進められています。
筆者紹介

稲山 一幸(いねやま かずゆき)エンジニアリング事業 シニアアプリケーションスペシャリスト
1992年住金制御エンジニアリング入社、Matrox社製品の国内総代理店立ち上げに参画、以降25年マシンビジョン業界に携わる。
2013年~2016年、キヤノン株式会社にてマシンビジョン関連の新製品開発のソフトウェアリーダとして従事。現在は、エバンジェリストとして活躍中。
関連するソリューション・製品
- 画像処理ソリューション
- 製造業における外観検査や異常検知、食品・医薬品・化粧品などにおける異物検査や成分量の測定、物流業における資材配置の点検などの課題に対して、最先端のマシンビジョンシステムを中心にソリューションを提供しています。
- 画像処理システム構築に必要な産業用カメラ、産業用パソコン、画像入力・処理ボード、ハイパースペクトルデータ処理や画像処理ライブラリ、さらにカメラと処理エンジンが一体化したAIスマートカメラなど、各種素材を取り揃えています。
- また、高い精度・高速処理が必要とされる各種検査機器、医療機器・印刷機器などに採用されたこれまでの経験を生かして、お客さまの課題やご要望をもとに最適な画像処理ソリューションをご提供していきます。