シニアアプリケーションスペシャリストによる「技術トレンド情報」(第36回) 「Visual SLAM(自己位置推定)について」その2コラム
公開日:2022年10月26日

今回は、話題のVisual SLAM技術(ステレオカメラを利用した自己位置推定技術)について、ご紹介いたします。
以前、コラム第24回「Visual SLAM(自己位置推定)について」で概要をご紹介させていただきましたが、非常に反響が大きく、数多くのお問い合わせをいただきました。また、先日、共想共創フォーラム2022(10/4~10/13開催)にて、これからの「シン・イメージング技術(超スマート社会で利用される”移動性”、”携帯性”、”機動性”を備えたイメージング技術)」の中でも、中心的な技術として紹介しました。今回は、実際の導入ケース及び、従来技術との比較についてご紹介いたします。
3つの導入ケース
Visual SLAM機能搭載カメラは、広角視野をもつステレオカメラセンサの高解像度化および、屋内外対応に向けたHDR(High Dynamic Range)対応、カメラデバイス内蔵のジャイロセンサ(9軸)、それらを組み合わせて処理を行うVisual SLAMプロセッシングにより、高速高精度に6DoF(カメラの3次元座標上での位置と向き)の出力が可能となっています。Visual SLAM機能搭載カメラとコントローラPCを接続した状態で、専用SDKを用いて、走行エリアを巡回させ、周辺地図マップの作成とマップ上でのリアルタイムなカメラの位置座標出力が行えます。また、マップの保存、読み出しも可能で、各階フロアのマップ変更、広域での走行、同一エリア走行時の別デバイスのマップに利用(再利用)できます。(その他、技術概要は、第24回コラム参照ください。)
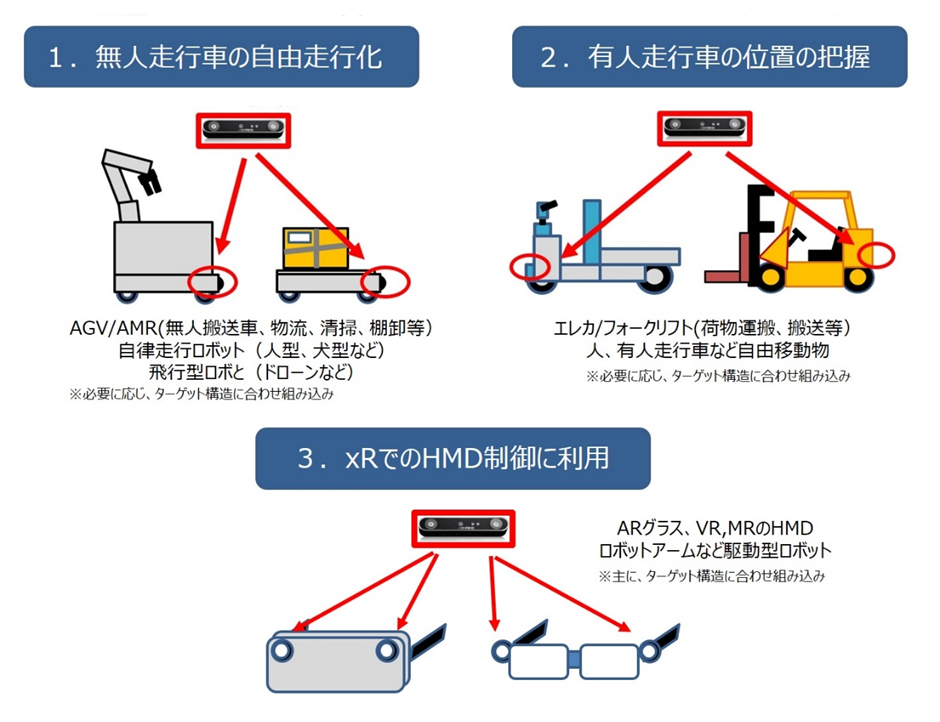
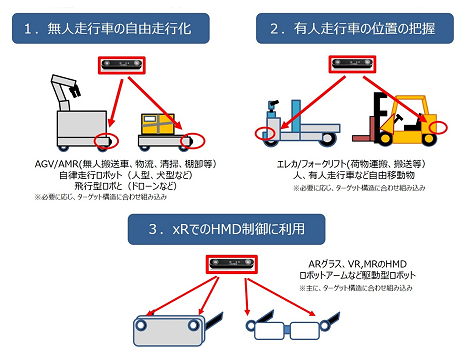
Visual SLAM技術の導入先、ユースケースは、大きく3種類あります。(図1)
1つ目は、自己位置と向きをリアルタイムに特定できるため、制御用PCを備えた搬送車に取り付けることで、搬送車を目的の位置へ移動制御できます。最も、適用されるユースケースとしては、無人走行車の自由走行化で、これまで、白線や黄線など床にはわせたライン上を移動していたAGVを経路変更時にもラインの引き直しなく、自由に走行可能となります。
2つ目は、物流現場で運行しているフォークリフトやエレカ(小型電気運搬車両)など、有人の構内車両に対する位置認識です。有人の走行車の場合、人の操作により自由に走行できますが、逆に、どこを走行中かを把握したいという要望があり、そのためのデバイスとしては、小さなVisual SLAM搭載カメラを取り付けるだけで、リアルタイムに位置検出ができるため、非常に有効な手段となっています。
Visual SLAM搭載カメラは、“眼”のイメージがありますが、必ず進行方向に取り付ける必要はなく、フォークリフトなど、前方に荷台があり、視野が狭まる場合などは、逆に後部に取り付けることも可能で、カメラとしては、後ろ向きに進む場合でも、高精度に位置を認識できます。
3つ目は、xRで利用されるHMD(ヘッドマウントディスプレイ)に搭載することで、人の頭の向き、視線方向のリアルタイム認識で利用されています。1つ目、2つ目では、カメラ自体をそのまま搭載しますが、3つ目は、人が装着するHMD内部に組み込むことが多く、ターゲットの内部構造にあわせOEMなどメーカー側と調整し対応します。
Visual SLAMの優位性
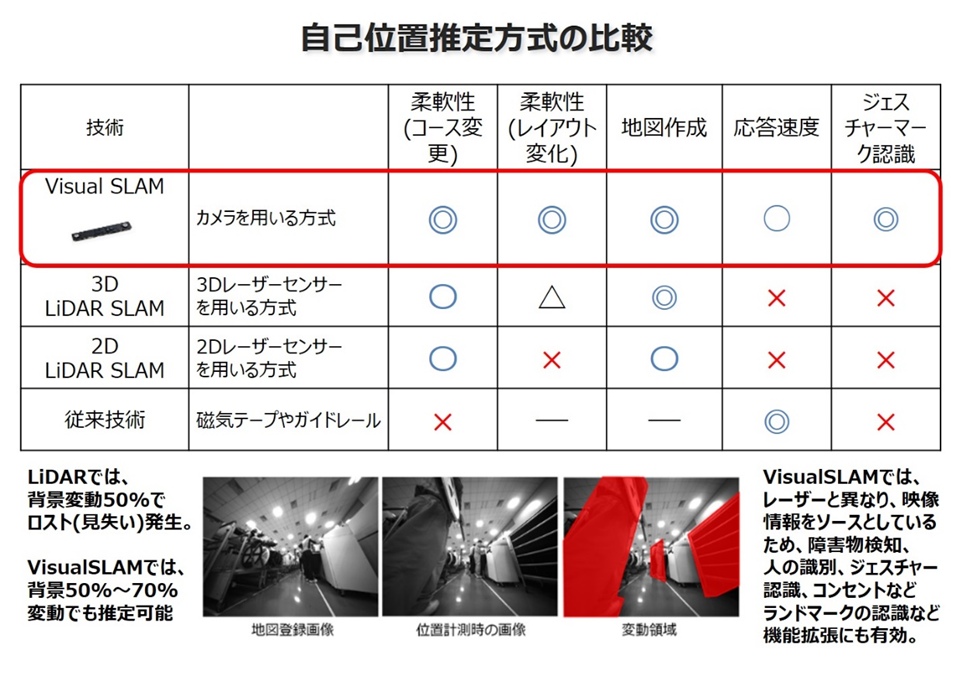
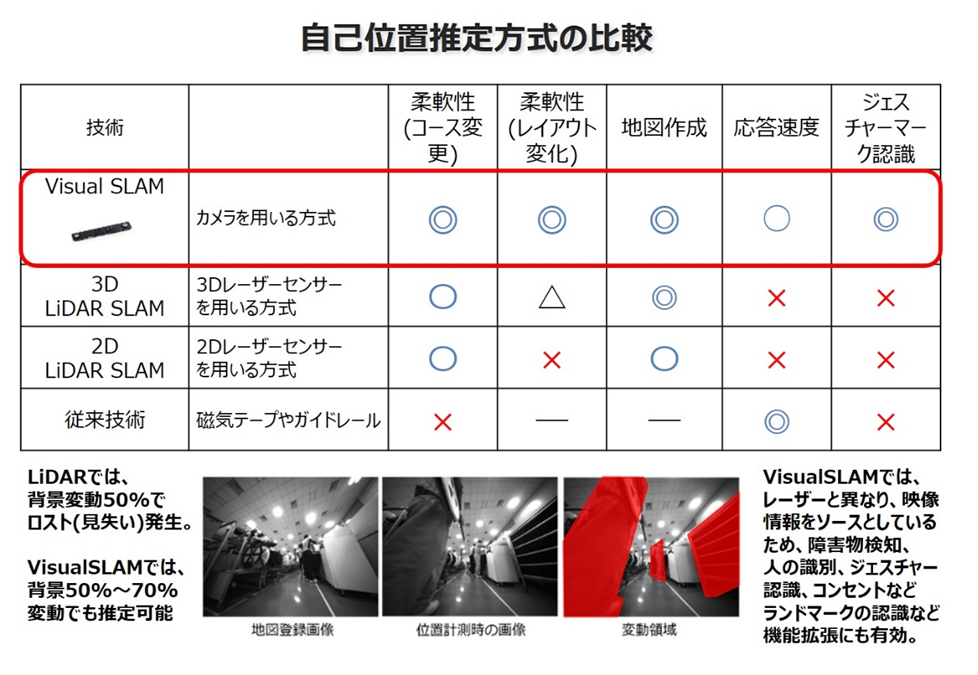
従来技術の磁気テープやガイドレールの方式及および、レーザースキャンによるLiDAR方式に比べ、柔軟性、機能面、応答速度ともに性能が向上しており、他の技術に比べ、Visual SLAMの方が、ロスト率(見失い率)が低いこと、位置精度が1/100の高精度であること、1ショットで位置推定できるため高速性(当社取り扱い製品は、現行最速の100fps)、さらに、コスト面もかなり低価格で提供されています。
特に、ロスト率は、LiDAR方式では、一定の高さのスキャン情報のみで推定されるため、マップ作成時の50%以下でも変動があると、ロストするのに対し、Visual SLAMでは、床や天井も含め、広角視野で推定するため、50%~70%でも、ロストしないことが検証されています。
Visual SLAMの苦手な点としては、カメラ映像を基にしているため、HDR(High Dynamic Range)がかなり向上したとはいえ、照明のないところや、屋外夜中の利用は難しく、また、全面1色の壁のみの空間など周囲環境に特徴(撮像画像で濃淡部)がないところでは、計測できません。
ただし、そのことは、初回のマップ作成時に、Visual SLAM専用ツールにより、どの個所で特徴量が少ないかが把握できるため、特徴量が少ない箇所には、適当にポスターを張る、形状物などを置くことで対処できます。さらに、Visual SLAM技術は、レーザーセンシングと異なり、映像情報をソースとしているため、障害物検知、人の識別や、ジェスチャー認識、コンセントや充電箇所といったランドマーク認識など自己位置推定以外のさまざまな制御にも応用できるため、次世代SLAMとして注目されています。
今回のまとめ
Visual SLAM搭載デバイスは、ステレオカメラの高解像度化も進み、高精度な認識ができるようになってきました。撮像映像の2次利用はこれからの機能拡張に期待が高く、よりリッチなエッジデバイスとして提供されています。
当社では、引き続き、AGV/AMRなど無人搬送車の自由走行化、フォークリフトや、エレカなど有人走行車の位置認識、さらに、AGVを利用した現場の自動化・無人化など、Visual SLAM技術搭載デバイスのご提供から導入支援を行います。ぜひお気軽にお問い合わせください。
筆者紹介

稲山 一幸(いねやま かずゆき)エンジニアリング事業 シニアアプリケーションスペシャリスト
1992年住金制御エンジニアリング入社、Matrox社製品の国内総代理店立ち上げに参画、以降25年マシンビジョン業界に携わる。
2013年~2016年、キヤノン株式会社にてマシンビジョン関連の新製品開発のソフトウエアリーダとして従事。現在は、エバンジェリストとして活躍中。
関連するソリューション・製品
- 画像処理ソリューション
- 製造業における外観検査や異常検知、食品・医薬品・化粧品などにおける異物検査や成分量の測定、物流業における資材配置の点検などの課題に対して、最先端のマシンビジョンシステムを中心にソリューションを提供しています。
- 画像処理システム構築に必要な産業用カメラ、産業用パソコン、画像入力・処理ボード、ハイパースペクトルデータ処理や画像処理ライブラリ、さらにカメラと処理エンジンが一体化したAIスマートカメラなど、各種素材を取り揃えています。
- また、高い精度・高速処理が必要とされる各種検査機器、医療機器・印刷機器などに採用されたこれまでの経験を生かして、お客さまの課題やご要望をもとに最適な画像処理ソリューションをご提供していきます。