自己位置推定システム with Vision-based Navigation Software
ガイドレスAGV/AMR 向け Visual SLAMソリューション
物流の2024年問題への対策として、パレット単位での貨物輸送が急速に普及しつつあります。
人では運べない重量物を輸送できるAGV(Automatic Guided Vehicle=無人搬送車)やAMR(Autonomous Mobile Robot=自律移動ロボット)を活用した自動化が、製造業、物流業などの様々な業界で進められています。
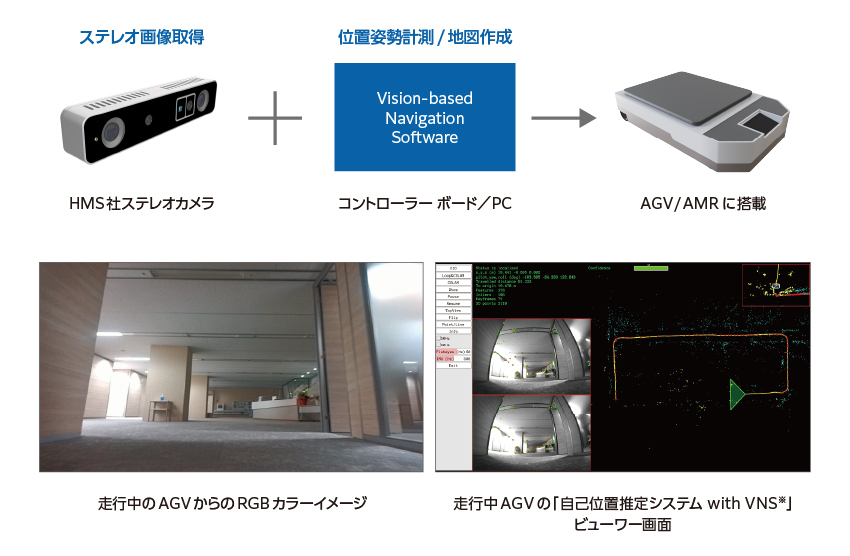
それらAGVやAMRの眼となる「自己位置推定システム with Vision-based Navigation Software」は、位置姿勢計測や地図作成機能をもつ高精度なソフトウェアとステレオカメラを組み合わせて提供するサービスロボットソリューションです。プログラム開発支援やステレオカメラを用いた試験実施をサポートいたします。
システムの概要
-
※
VNS = Vision-based Navigation Software
このような課題をお持ちのお客さまは、私たちに、ご相談ください
このような課題を解決
- 幅広い画角で撮影されたカメラ映像データを用いて、周囲の環境の3次元情報とカメラの位置姿勢を同時に推定するため、日々貨物が入出庫されるようなレイアウト変化の多い現場でも柔軟に対応
特長
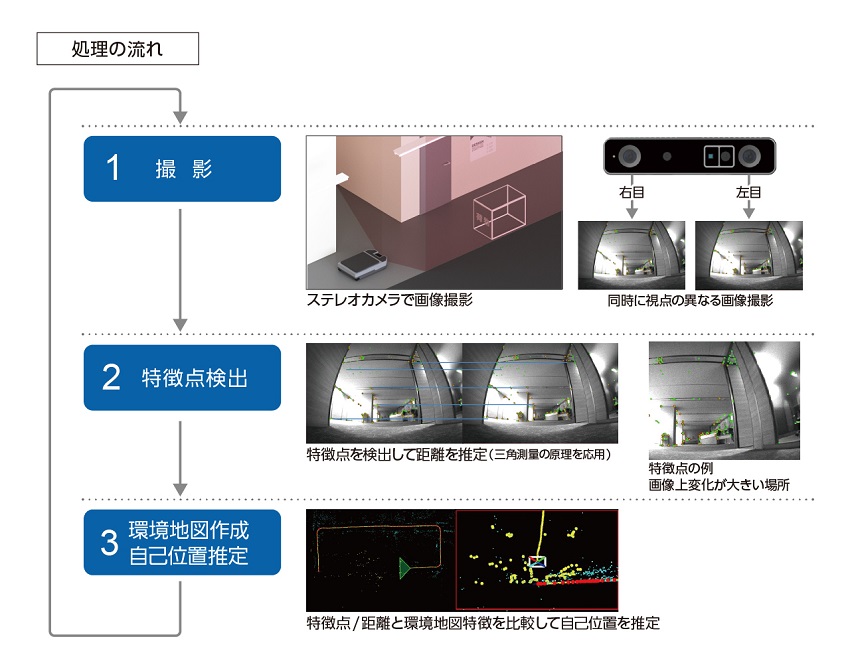
Visual SLAM(Visual Simultaneous Localization and Mapping )技術は、カメラ映像を用いた周辺特徴の抽出により、自己位置推定と環境地図作成を同時に行う技術です。
「移動ロボットの眼」となり、幅広い画角で撮影されたカメラ映像データを用いて、周囲の環境の3次元情報とカメラの位置姿勢を同時に推定するため、レイアウト変化の多い現場でも柔軟に対応することができます。
Vision-based Navigation Software で提供されるVisual SLAM技術は、立ち上げ時の高速な位置姿勢計測はもちろん、暗所や逆光にも強く、場所移動による急な照明の変動や、外光環境にも、高い順応性を持つよう設計されています。
「Vision-based Navigation Software」
位置姿勢計測
- 特徴点が少なく検出が難しい環境においても、高精度の計測が可能
- 照明変動や外光環境への順応に優れている(暗所や逆光に強い)
- レイアウトや風景変更が多い現場でも、対応可能
- 初期位置出力が早く(起動してすぐに使用開始可能)、地図のスムースな切替が可能
豊富な機能
- カメラ間で地図共有ができる機能搭載
- 周辺環境の変化による認識精度への影響を極力少なく抑えられる
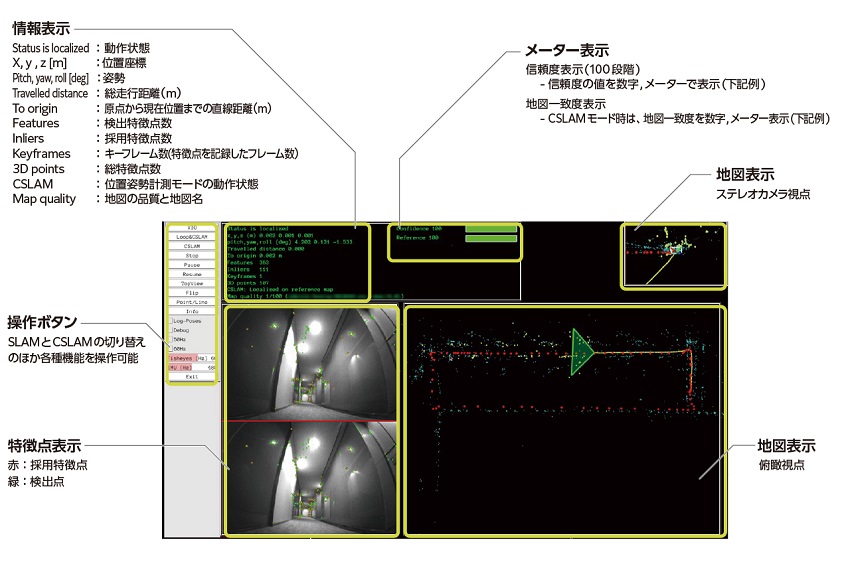
- 検出した特徴点や作成した地図の出力などUIが充実している
- 大規模な工場や倉庫に対応
環境確認/課題対応に必要な機能を搭載したビューワー
-
カメラとノートPCによる位置姿勢計測の閲覧が可能(特徴点分布や地図形状、信頼度を閲覧可能)
スマートカメラ「SiNGRAY Stereo PRO」
- 高速なAIプロセッサおよび、IMUプロセッサ(9軸ジャイロ)を搭載
- ステレオ映像、カラー映像、3Dデプス映像を同時に撮像し物体認識、ジェスチャー認識などAI画像認識や自己位置推定をリアルタイムに処理
システム構成例
AGV/AMRシステム
-
AGV/AMRが自動・自律走行するための眼
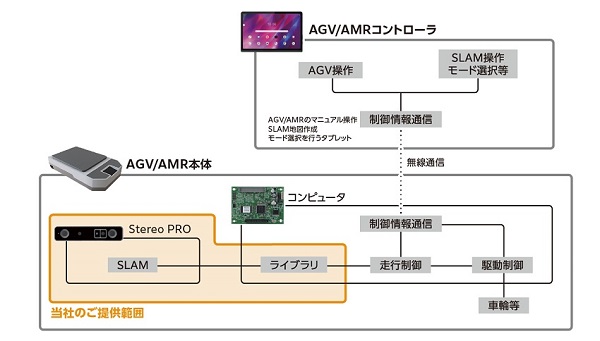
ビューワーシステム
-
AGV/AMRの搭載検討や導入環境確認のためのツール
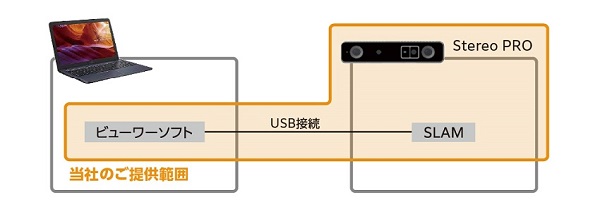
※双方システムのSLAM部分は同一です
※ToFやAIについては、現時点のVision-based Navigation Softwareではサポートされておりません
関連製品・オプション

コラム・レポート
資料ダウンロード
画像処理ソリューション 導入のご相談・お問い合わせ
キヤノンITソリューションズ株式会社