シニアアプリケーションスペシャリストによる「技術トレンド情報」(第8回)ラインセンサカメラの撮像制御コラム
公開日:2019年5月28日
シニアアプリケーションスペシャリスト
筆者 稲山 一幸

今回は、前回のエリアカメラの撮像制御に続き、ラインカメラの撮像制御についてお話しさせていただきます。ラインカメラは、コラム第4回でご紹介しましたが、印刷物などシート状に連続移動するものや、円盤や円筒状の回転動作するワークの撮像に必要なシステム構成となります。
ラインカメラ制御の外部機器と制御モード
さて、撮像制御については、大きくは、前述の2つのタイプになります。1つは、カメラのフレームレートを目安とする場合で、カメラの内部同期で撮像した画像データをそのままパソコンのメモリに転送するもので、外部同期を伴わない簡易な制御となります。一般的にカメラメーカまたは、フレームグラバメーカが準備している撮像ライブラリを活用することで、簡単にカメラからパソコンのメモリに取り込むことができます。連続的に取り込まれる画像に対して画像処理を行います。一方、対象ワークの搬送、タウトタイムを目安とする場合は、対象ワークの到着タイミングを示すセンサー信号をもとに撮像を行う必要があります。搬送系に対物センサーを取り付け、対象ワークの到着信号をフレームグラバーで受け取り、フレームグラバからカメラと照明を制御し撮像します。システム寿命を延ばすため、照明は常時点灯させるのではなく、カメラの露光前に照明を点灯し、露光が終われば消灯するストロボ撮像が用いられます。
-
フリーランモード
-
固定ラインスキャンモード
-
可変単相制御モード(A相、もしくはB相の一方を使用)
-
可変両相制御モード(A相、B相の両方を使用)
フリーランモード
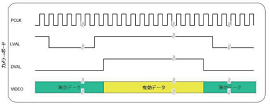
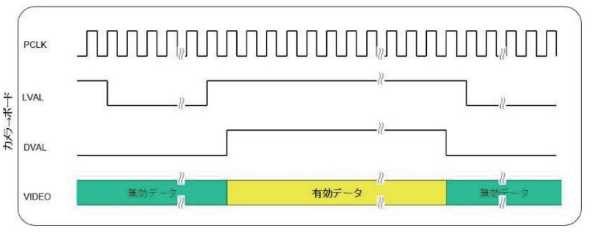
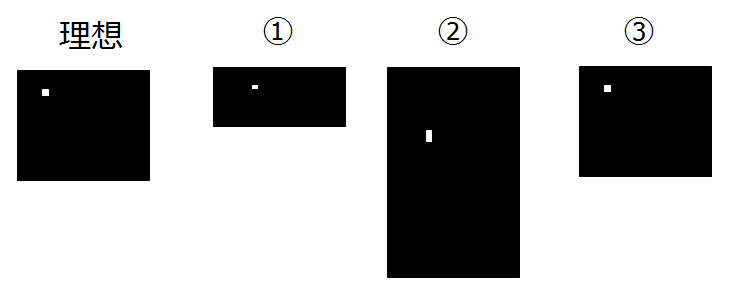
フリーランモードは、カメラ内部で設定されているスキャンレートと露光時間で撮像し、画像データを出力します(図1)。外部信号と連動しないため、ワークの移動が速い場合は縦に短い像となり(図2の①)、遅いと長くなります(図2の②)。対象ワークが一定速度で移動(回転)する場合や、ラインカメラの動作確認時によく使用されます。
固定ラインスキャンモード
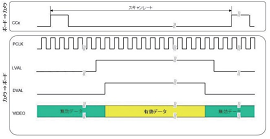
固定ラインスキャンモードは、画像入力ボードからカメラに対し、スタートパルス(ライントリガ)を与えることにより、カメラのスキャンレートを決め撮像する方式です(図3)。画像入力ボードに設定された固定タイミングでカメラに対してスタートパルス信号を送信するので、画像入力ライブラリ側で制御しやすくなります。しかし、撮像画像は、外部からの信号を受けていないため、前述と同じ状態になります(図2の①と②)。
可変単相制御モード(A相、もしくはB相の一方を使用)
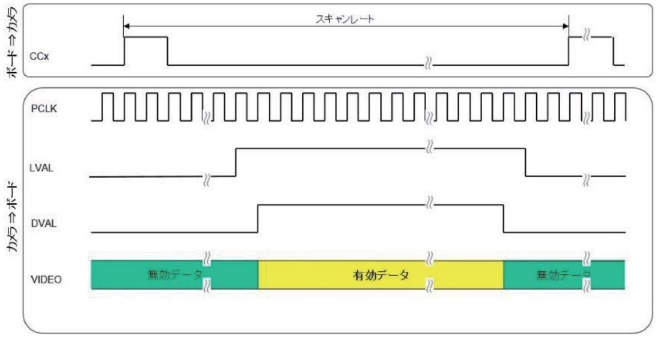
可変単相制御モードは、最も基本的な方式になります。搬送系からの出力信号(エンコーダのA相またはB相信号)を画像入力ボードに入力し、信号の立ち上がりまたは、立下りを基にスタートパルスとして同期撮像する方式です(図4)。ワークの移動速度にかかわらず、縦方向に伸縮のない安定した像を得ることができます(図2の③)。また、エンコーダの出力パルス数を分周し、スタートパルスを調整することもできます(図5)。
可変両相制御モード(A相、B相の両方を使用)
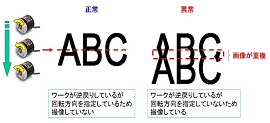
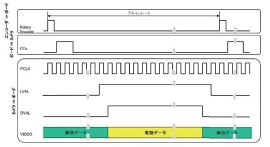
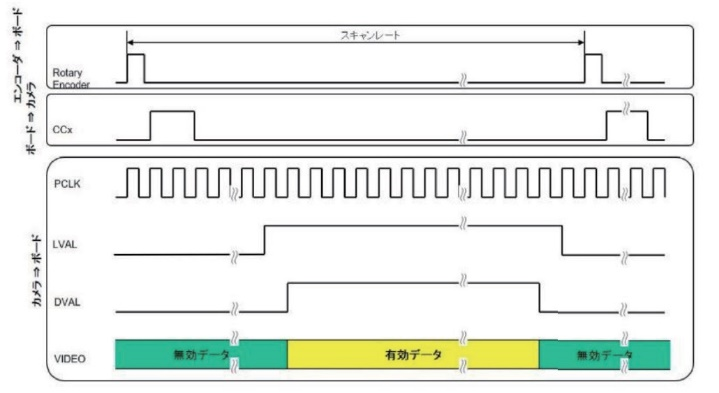
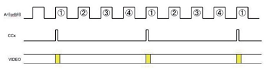
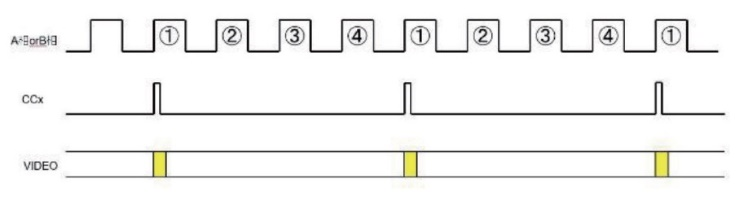
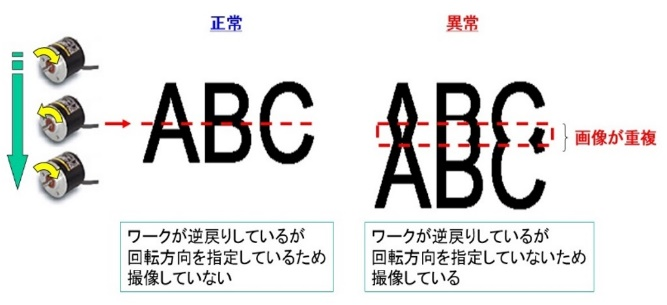
可変両相制御モードは、最も推奨される方式です。搬送系からの出力信号(エンコーダのA相とB相の両相)を使用し、単相制御より細かなタイミングで同期撮像する方式です。基本的には可変単相制御モードと同じですが、1/4位相がずれた関係をもつA相とB相の両相信号を画像入力ボードに入力することで、パルス(A相、B相)の立ち上がり、立下りから回転方向を認識し、順方向時のみ撮像することが可能です(第6図)。対象ワークがシート状のように連続的に続く場合ではなく、カット紙のように一定の大きさをもつ場合には、ワーク到着信号の立ち上がりから指定ライン数分だけ撮像するか、または、ワーク到着信号の立ち上がりから立下りの間を撮像し続けるなどの制御も可能です。
今回のまとめ
今回は、ラインカメラシステムで重要な撮像制御に触れました。外部トリガーとエンコーダとの連携制御ができれば、ほぼすべてのシステムでの撮像制御が可能となります。対象ワークの搬送や駆動状態に合わせた撮像にご活用ください。
-
※
内容は予告なく変更になる場合があります
関連するソリューション・製品
- 画像処理ソリューション
- 製造業における外観検査や異常検知、食品・医薬品・化粧品などにおける異物検査や成分量の測定、物流業における資材配置の点検などの課題に対して、最先端のマシンビジョンシステムを中心にソリューションを提供しています。
- 画像処理システム構築に必要な産業用カメラ、産業用パソコン、画像入力・処理ボード、ハイパースペクトルデータ処理や画像処理ライブラリ、さらにカメラと処理エンジンが一体化したAIスマートカメラなど、各種素材を取り揃えています。
- また、高い精度・高速処理が必要とされる各種検査機器、医療機器・印刷機器などに採用されたこれまでの経験を生かして、お客さまの課題やご要望をもとに最適な画像処理ソリューションをご提供していきます。