シニアアプリケーションスペシャリストによる「技術トレンド情報」(第22回)AI技術について その2コラム
公開日:2020年11月27日

前回、画像内から矩形領域で物体を検出する①物体検出(ClassNet)と、それに分類を加えた②物体分類(DeNet)を紹介いたしました。今回は、画素分類(SegNet)、3D認識(3DNet)について紹介いたします。ディープラーニングや、CNNについては前回コラム第21回をご覧ください。
画素分類「SegNet」について
前回ご紹介した物体検出(ClassNet)と物体分類(DeNet)では、画像内の対象物(人や車、製品や部品など)を矩形で検出するものでしたが、画素分類「SegNet」は、対象物を画素単位で検出します。
用途としては、局所的に不定形なキズや汚れの検出や、広範囲に不定形なムラなどの検出に適しています。学習時も、画像内のキズやムラに対して、それらを囲むように指定します。
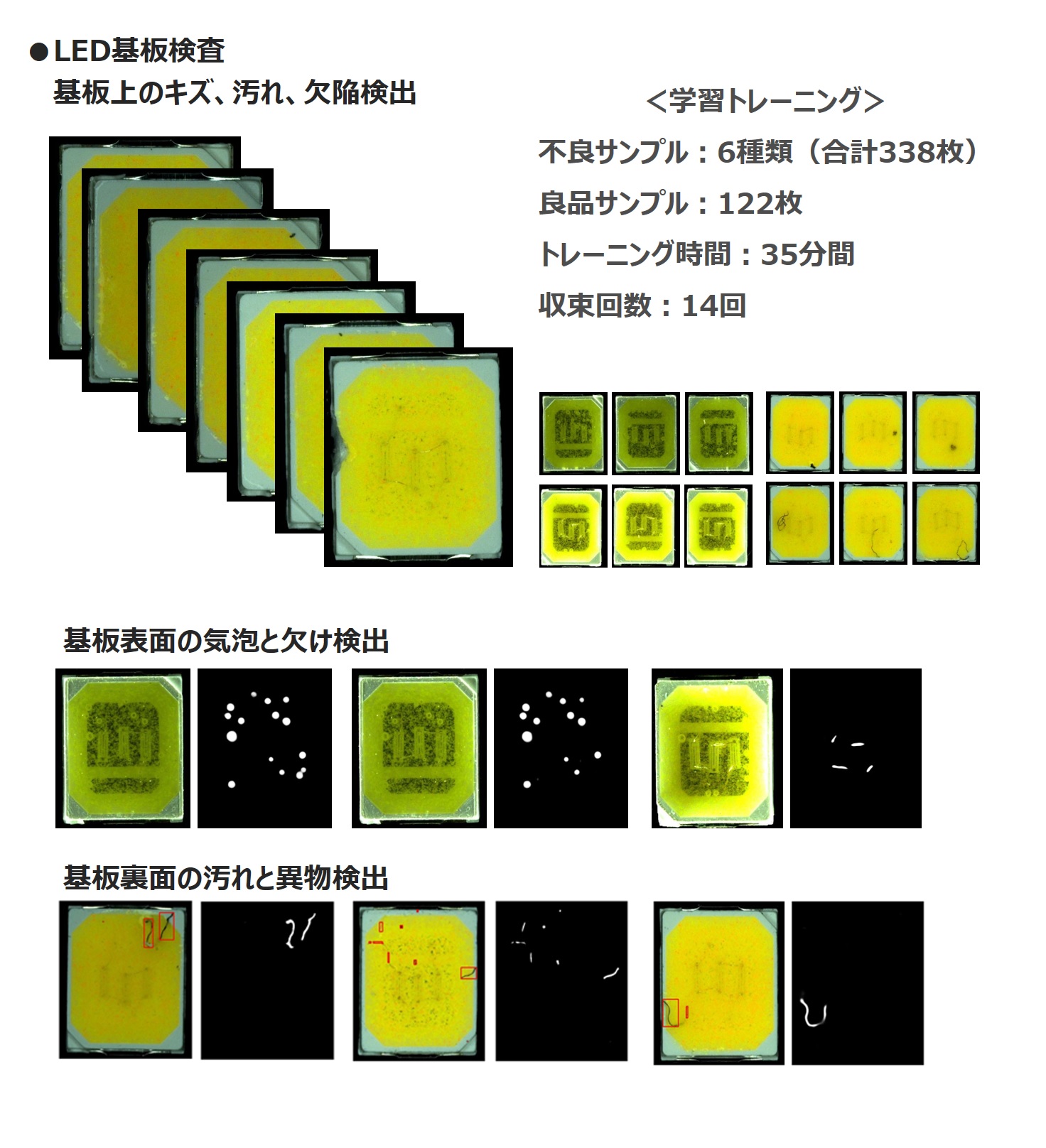
図1のLED基板検査事例では、良品サンプル122枚、不良サンプル(6種類)338枚の画像を用いて、収束回数14回※1、学習時間35分で実施しています。結果画像では、気泡や欠け、汚れの箇所を画素単位で検出していることがわかります。
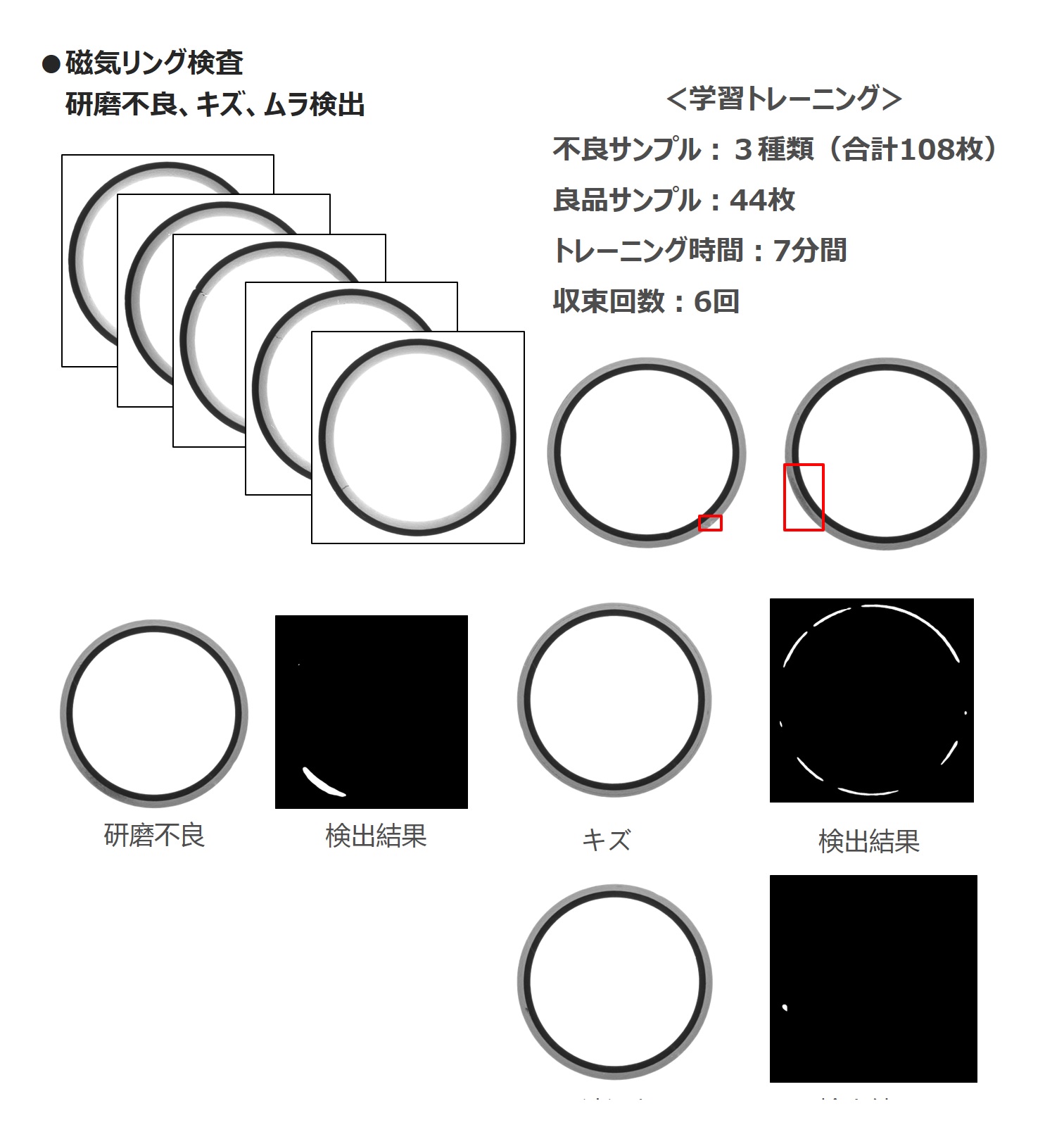
図2の磁気リング検査事例では、良品サンプル44枚、不良サンプル(3種類)108枚の画像を用いて、収束回数6回※1、学習時間7分で実施した例です。結果画像では、研磨不良やキズの箇所を画素単位で検出しています。
-
※1
収束回数とは、与えられた画像で最大性能になるまでの学習回数を示します。
3D認識「3DNet」について
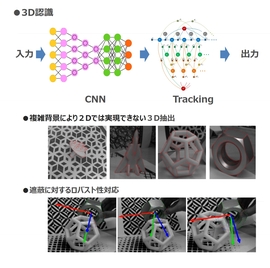
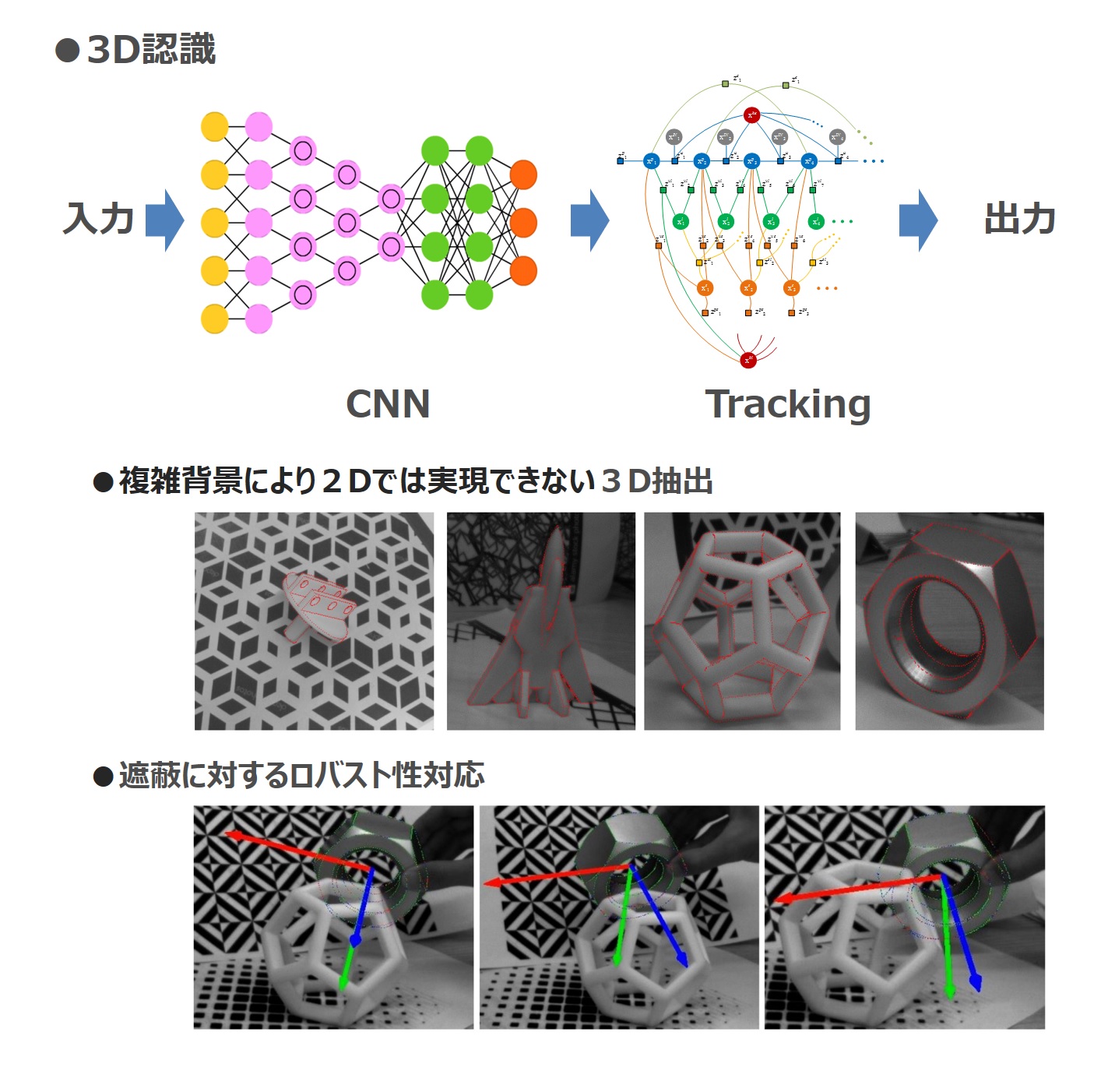
3D認識「3DNet」では、3D情報を基に対象物の姿勢を検出します。用途としては、ロボットピッキングや障害物検知など、2Dでは誤認識するようなケースでも、3D情報を活かし、物体の姿勢を高精度に検出します。技術的には、CADモデルまたは、実写画像サンプルから生成した3Dモデルを使用し、高速な3Dマッチングとトラッキング技術の組み合わせで構成されます。
図3では、2Dでは困難な複雑背景での検出例と、3D物体の陰になる場面での検出例を挙げています。
今回のまとめ
今回は、代表的な5つのCNN(畳み込みニューラルネットワーク)のうちの2つ「SegNet」と「3DNet」ついてご紹介いたしました。次回は、ロボット、AGV、ARグラスなどでも活用が進む、ポーズ認識「PoseNet」についてご紹介いたします。
筆者紹介

稲山 一幸(いねやま かずゆき)エンジニアリング事業 シニアアプリケーションスペシャリスト
1992年住金制御エンジニアリング入社、Matrox社製品の国内総代理店立ち上げに参画、以降25年マシンビジョン業界に携わる。
2013年~2016年、キヤノン株式会社にてマシンビジョン関連の新製品開発のソフトウエアリーダとして従事。現在は、エバンジェリストとして活躍中。
関連するソリューション・製品
- 画像処理ソリューション
- 製造業における外観検査や異常検知、食品・医薬品・化粧品などにおける異物検査や成分量の測定、物流業における資材配置の点検などの課題に対して、最先端のマシンビジョンシステムを中心にソリューションを提供しています。
- 画像処理システム構築に必要な産業用カメラ、産業用パソコン、画像入力・処理ボード、ハイパースペクトルデータ処理や画像処理ライブラリ、さらにカメラと処理エンジンが一体化したAIスマートカメラなど、各種素材を取り揃えています。
- また、高い精度・高速処理が必要とされる各種検査機器、医療機器・印刷機器などに採用されたこれまでの経験を生かして、お客さまの課題やご要望をもとに最適な画像処理ソリューションをご提供していきます。