シニアアプリケーションスペシャリストによる「技術トレンド情報」(第13回) マシンビジョンの計測精度 コラム

計測について
マシンビジョンの機能は、大別すると「検出(最小画素単位で対象を抽出する機能)」、「計測(形状をもつ対象に対し測定する機能)」、「認識(形状や模様をもつ対象を識別する機能)」の3つとなります。中でも「計測」は、昨今話題のAI技術の登場においても、画像をソースとしたAI技術では計測数値を戻り値にできないことから、AIでは置き換えにくい分野の一つとされています。外観検査の中には、欠陥判定の基準が長さや幅など計測値を基準にしたものが多く、マシンビジョンで自動化する場合、「計測」機能を活用し、画像データから長さや幅、角度などを算出することになります。
計測精度について
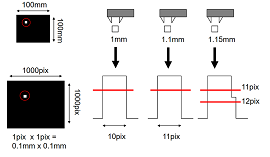
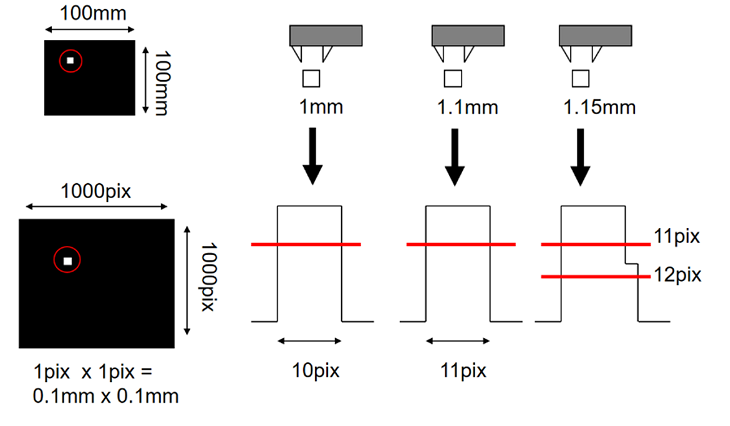
「計測」処理で幅を図る例を考えてみます。前回コラムでご紹介した「検出」機能で、距離を測る場合は、ピクセル単位での処理となるため、輝度の閾値をもとにピクセル数を数えることになります。例えば、1ピクセル0.1mmの分解能で、コントラスのよい理想的な条件として、真暗な背景で真白な11.5mmの幅をもつ対象を撮像した場合とします。ある閾値で幅を計測すると、11ピクセルとなり、ある閾値では12ピクセルとなってしまう場合、どちらが正しいでしょうか。もちろん、結果は11.5mmなので、「検出」機能だけでは、正確な数値がわからないことになります。そのため、「計測」には、検出座標値や輝度値を用いて算出を行う“画像処理”が必要となります。こちらの例では、境界を算出するため検出座標値を基にその平均値をとることで、11.5mmを求めることができます。(図1)。
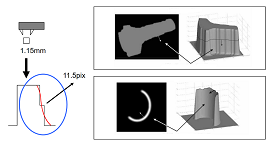
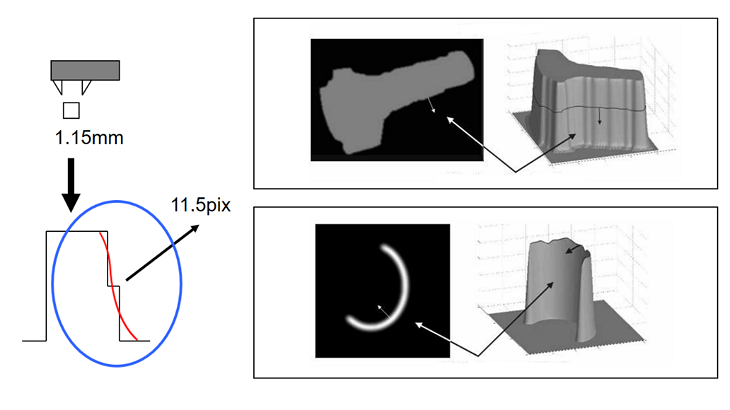
「計測」では、“境界”だけでなく、輝度の“稜線”を扱う場合があります。輝度変化の平均値(山の中腹)か、輝度変化の最高値(稜線)を抽出することで、様々な形状の特徴量の計算で使用します(図2)。
「MIL」の計測機能ツール(図3)
「計測精度」を高めるには、前回「検出精度」同様、“撮像分解能“と“コントラスト“、そして、”画像処理精度“が必要となります。画像処理精度に関しては、画像処理での計算技術となりますが、近年では、簡単に高精度な計測機能を搭載した汎用画像処理ライブラリや、プログラミング不要でフローチャート操作だけで簡単に使用できるツールが提供されています。
弊社取り扱いの画像処理ライブラリMatrox社製「MIL」や、フローチャート式画像処理ツール「DA」もそれらに相当しますが、ユーザは、幅や高さ、角度、円弧など求めたいものを指定するだけで検出することが可能です。(図3)。

今回のまとめ
今回は、「計測」に着目しましたが、前回の「検出」についても、画素サイズが1画素未満を含めると、「検出」も「計測」の範囲に含めることができます。ただし、検出にあたる画像輝度の検討と、計測については、特に画像処理技術が関連するため、2回に分けてお話をさせていただきました。次回は、マシンビジョンの3つの機能のうち、「認識」についてお話をさせていただきます。
筆者紹介

稲山 一幸(いねやま かずゆき)エンジニアリング事業 シニアアプリケーションスペシャリスト
1992年住金制御エンジニアリング入社、Matrox社製品の国内総代理店立ち上げに参画、以降25年マシンビジョン業界に携わる。
2013年~2016年、キヤノン株式会社にてマシンビジョン関連の新製品開発のソフトウエアリーダとして従事。現在は、エバンジェリストとして活躍中。
関連するソリューション・製品
- 画像処理ソリューション
- 製造業における外観検査や異常検知、食品・医薬品・化粧品などにおける異物検査や成分量の測定、物流業における資材配置の点検などの課題に対して、最先端のマシンビジョンシステムを中心にソリューションを提供しています。
- 画像処理システム構築に必要な産業用カメラ、産業用パソコン、画像入力・処理ボード、ハイパースペクトルデータ処理や画像処理ライブラリ、さらにカメラと処理エンジンが一体化したAIスマートカメラなど、各種素材を取り揃えています。
- また、高い精度・高速処理が必要とされる各種検査機器、医療機器・印刷機器などに採用されたこれまでの経験を生かして、お客さまの課題やご要望をもとに最適な画像処理ソリューションをご提供していきます。