![]()
- コラム
シニアアプリケーションスペシャリストによる「技術トレンド情報」(第7回)
エリアセンサカメラの撮像制御 [2019.04.23]

エンジニアリングソリューション事業部
シニアアプリケーションスペシャリスト
筆者 稲山 一幸
これまでは、撮像に関わる産業用カメラや画像入力ボード等デバイスについてふれてきましたが、今回は、マシンビジョンシステムの要というべき、“撮像制御”についてお話しさせていただきます。
速度要件とリアルタイム
“撮像制御”は特に速度要件を実現するための重要なテーマとなります。一般的にシステムの性能要件は、精度要件と速度要件で構成されます。マシンビジョンシステムにおける精度要件は、目的のキズや欠陥の検出可否や計測時の単位や閾値が指標となり、速度要件は、対象ワークの移動や変化の速度が指標となります。特に対象ワークの移動や変化に合わせ同時に処理を行うことをリアルタムと呼び、速度要件の目標値となります。
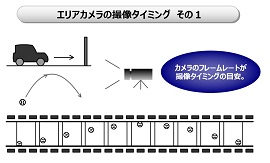
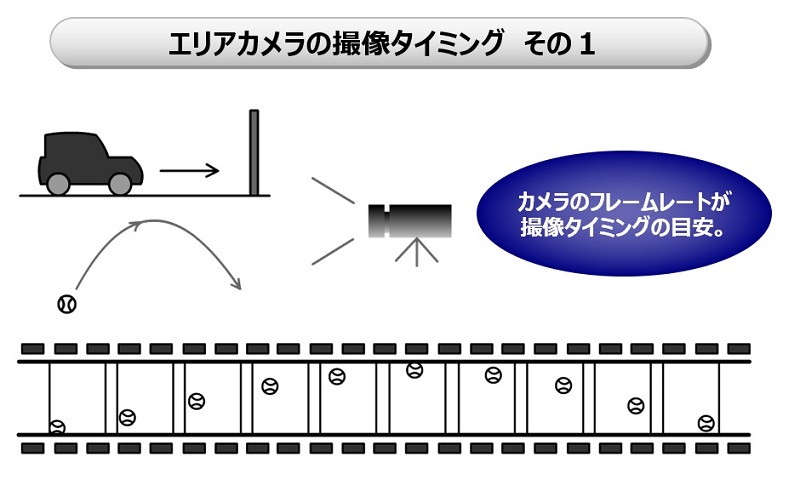
例えば、対象ワークが1秒間に1個搬送される場合は、搬送にあわせ1秒間に1個処理することができればリアルタイムとなります。もちろん、より高速に検査ができるのであれば、製造効率の向上につなげることができます。どこまで高速化できるのか、それは、カメラの撮像速度(フレームレート)が最大値となります。
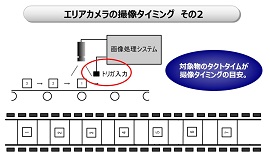
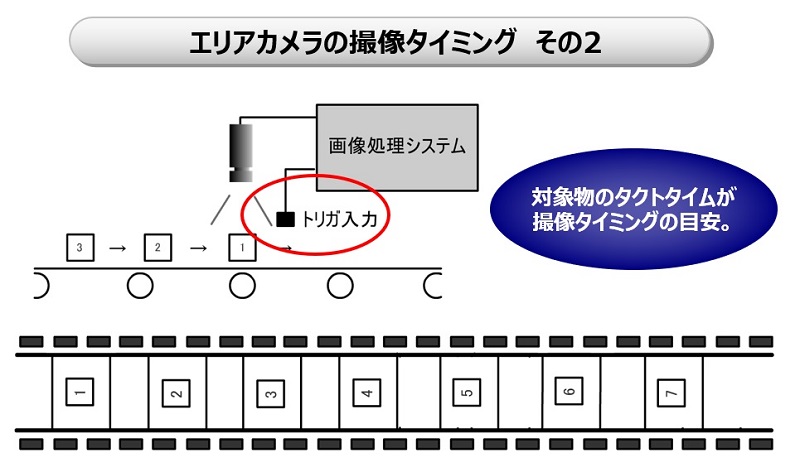
一方、車の衝突実験や高速流動観測など、とにかく高速に一瞬一瞬の変化をとらえたい場合は、高速フレームレートのカメラを選定することになります。つまり、撮像のタイミングとしては、カメラのフレームレートを目安とするか、タクトタイムを目安とするか、そして、それに合わせた撮像制御が必要になります。
撮像制御
{kind=link}
{kind=link}
{kind=link}
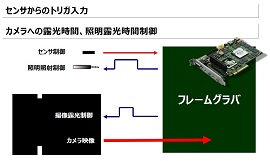
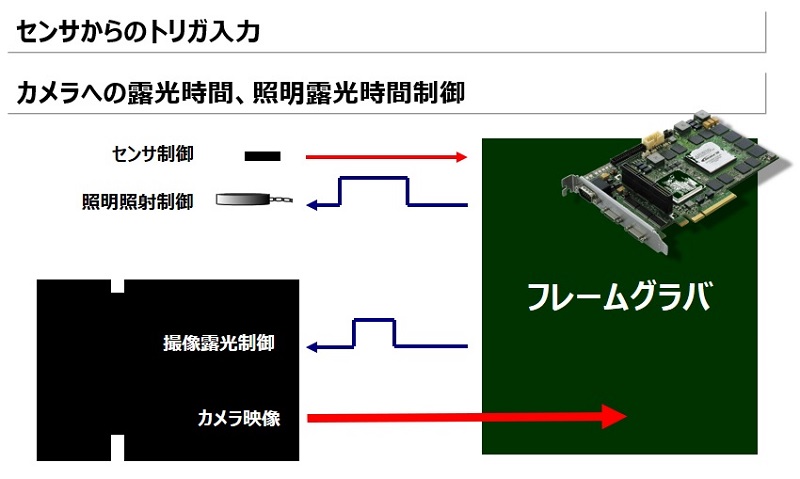
さて、撮像制御については、大きくは、前述の2つのタイプになります。1つは、カメラのフレームレートを目安とする場合で、カメラの内部同期で撮像した画像データをそのままパソコンのメモリに転送するもので、外部同期を伴わない簡易な制御となります。一般的にカメラメーカまたは、フレームグラバメーカが準備している撮像ライブラリを活用することで、簡単にカメラからパソコンのメモリに取り込むことができます。連続的に取り込まれる画像に対して画像処理を行います。一方、対象ワークの搬送、タウトタイムを目安とする場合は、対象ワークの到着タイミングを示すセンサー信号をもとに撮像を行う必要があります。搬送系に対物センサーを取り付け、対象ワークの到着信号をフレームグラバーで受け取り、フレームグラバからカメラと照明を制御し撮像します。システム寿命を延ばすため、照明は常時点灯させるのではなく、カメラの露光前に照明を点灯し、露光が終われば消灯するストロボ撮像が用いられます。
今回のまとめ
今回は、マシンビジョンシステムを構築する上で、最も重要となる撮像制御に触れました。範囲としては、エリアカメラの撮像制御ということになりますが、全世界の90%がエリアカメラによるシステムであるため(コラム1参照)、ほとんどのシステムの撮像制御は、今回ご紹介した2つの撮像制御のどちらかになります。次回は、印刷物などシート状に連続移動するものや、円盤や円筒状の回転動作するワークの撮像に適したラインカメラの撮像制御についてお話しさせていただこうと思います。
※内容は予告なく変更になる場合があります
関連するソリューション・製品
- 画像処理ソリューション
製造業における外観検査や異常検知、食品・ 医薬品・化粧品などにおける異物検査や成分量の測定、物流業における資材配置の点検などの課題に対して、最先端のマシンビジョンシステムを中心にソリューションを提供しています。
画像処理システム構築に必要な産業用カメラ、産業用パソコン、画像入力・処理ボード、ハイパースペクトルデータ処理や画像処理ライブラリ、さらにカメラと処理エンジンが一体化したAIスマートカメラなど、各種素材を取り揃えています。
また、高い精度・高速処理が必要とされる各種検査機器、医療機器・印刷機器などに採用されたこれまでの経験を生かして、お客さまの課題やご要望をもとに最適な画像処理ソリューションをご提供していきます。